Glenn’s Computer Museum |
| Home | New | Old Military | Later Military | Analog Stuff | IBM Stuff | S/3 Mod 6 | S/32 | Components | Encryption | Misc | B61 |
change log |
contact me |
![]()
Glenn’s Computer Museum |
| Home | New | Old Military | Later Military | Analog Stuff | IBM Stuff | S/3 Mod 6 | S/32 | Components | Encryption | Misc | B61 |
change log |
contact me |
![]()

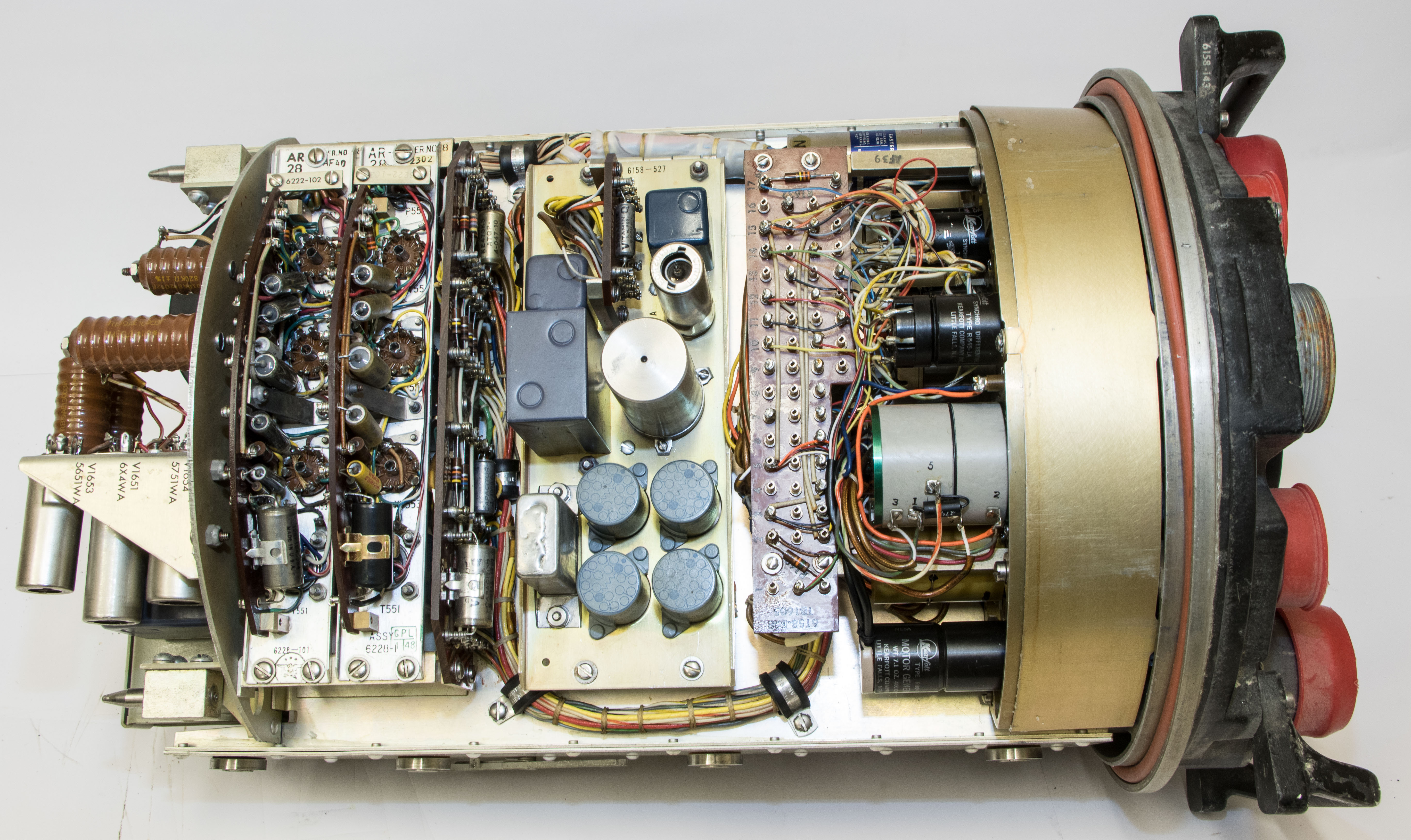
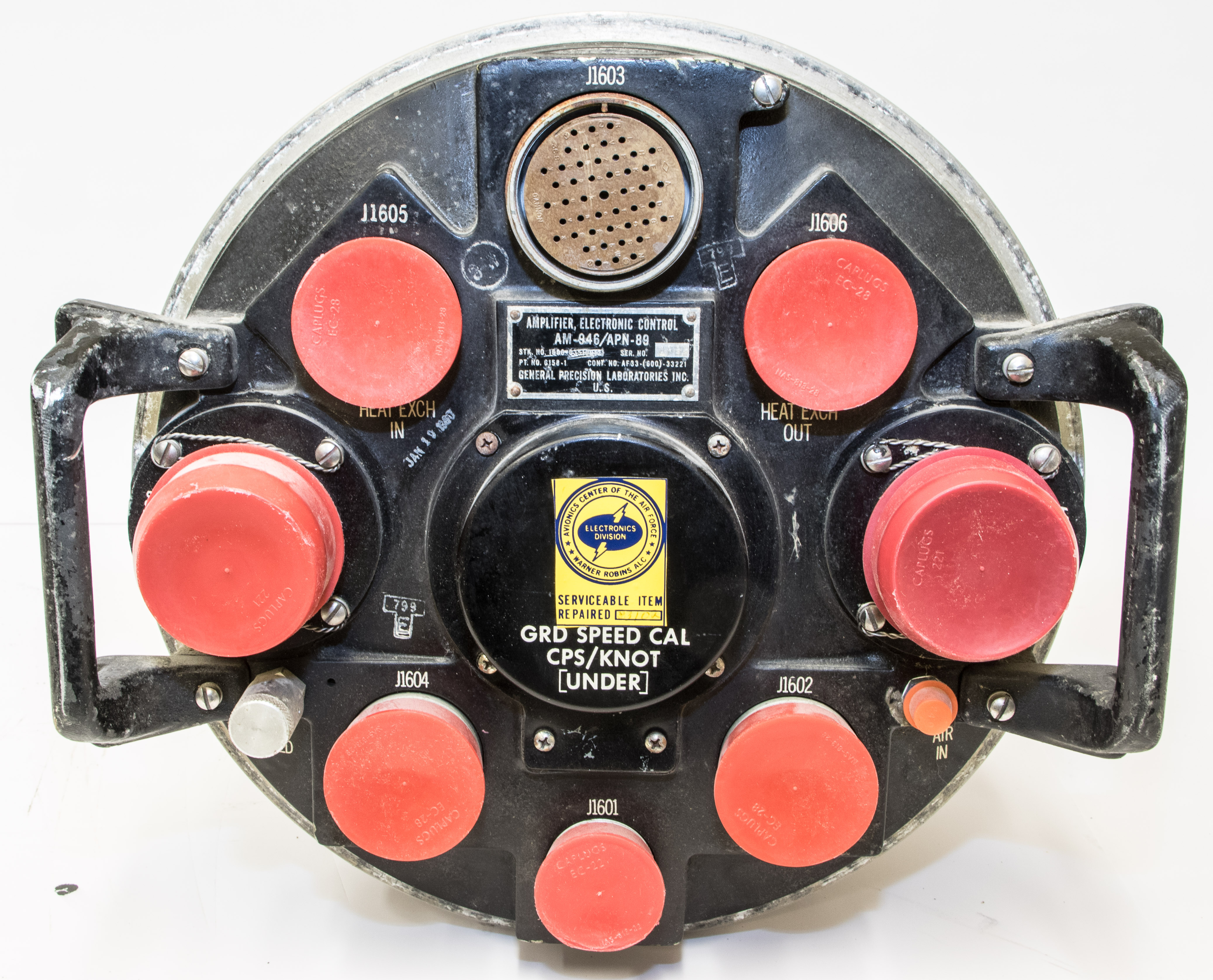
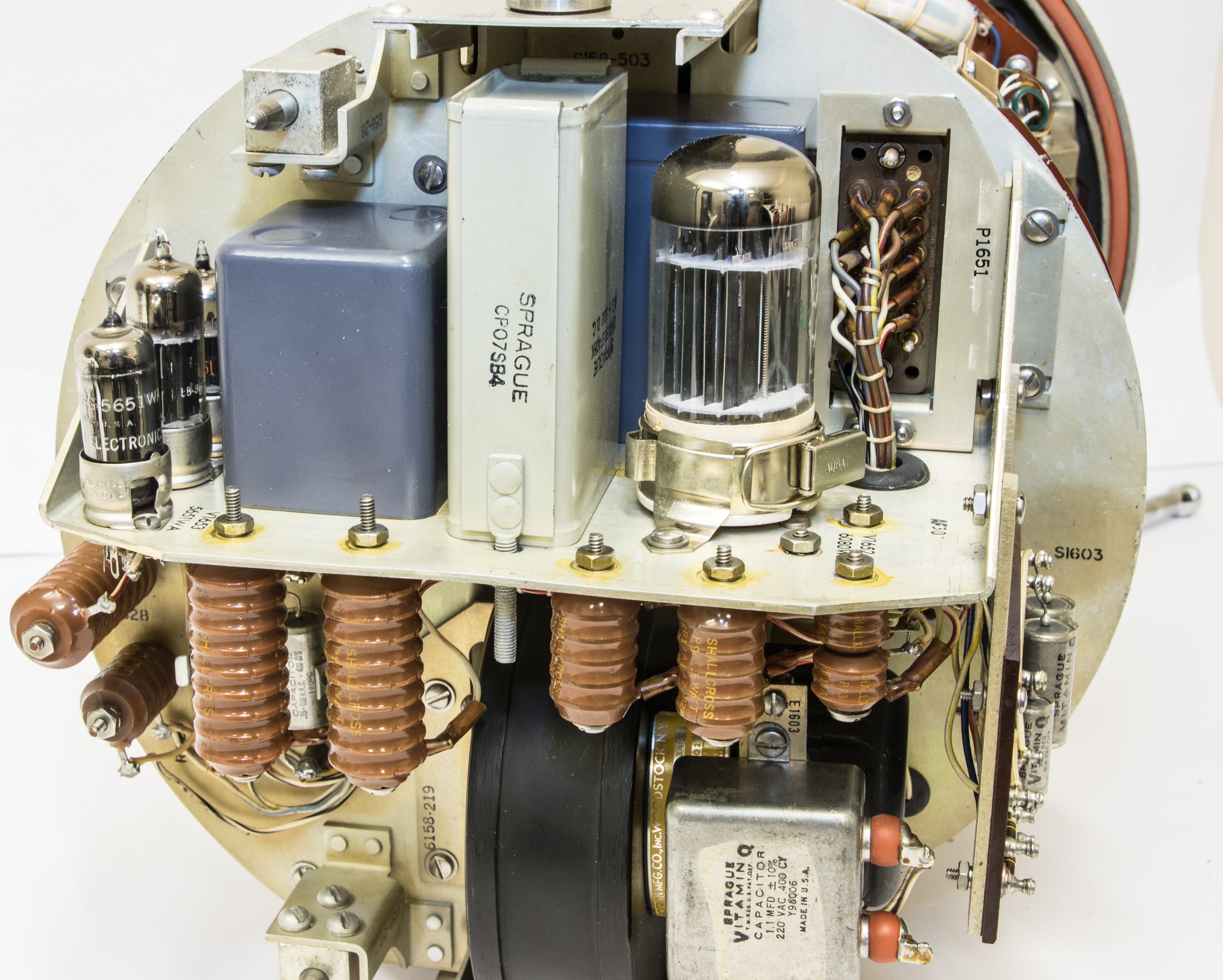
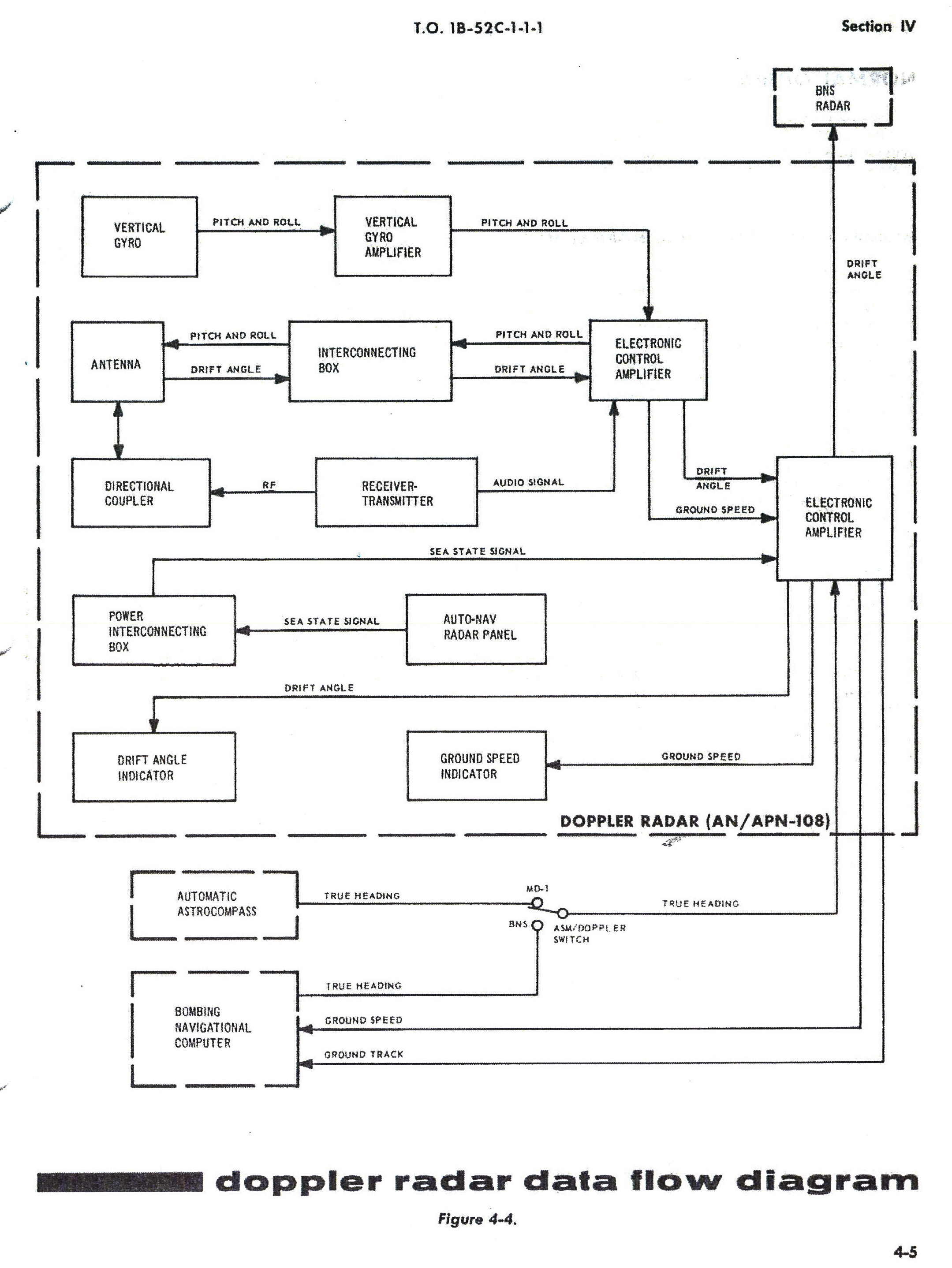
This device is one component of the AN/ASQ-38 bombing/navigation system developed for the B-52E bomber, first placed in service in 1957. The AN/ASQ-38 bombing and navigation system comprises many parts including:
(Figure 6 shows the components from a very similar AN/APN-108, which was used on a different model of the B-52.)
The APN-89 system uses doppler radar to provide ground speed and drift angle information to the ASb navigation system. The Doppler radar fed ground speed and drift information into the ASB navigation system. To calculate ground speed using Doppler radar, a radar signal is transmitted at a specific frequency that reflects off of the ground and returns to the plane. Since the plane's radar sensor is moving relative to the ground, the reflected signal will be shifted in frequency when it returns. This shift in frequency allows measurement of the relative velocity between the sensor and target. This, of course, is the same mechanism used in various speed detectors ("radar guns"), as well as in weather radar and many other applications.
The general formula for the shift in frequency is:
Fshift = 2V(Fi/c)cos(t)
where V is the velocity difference, Fi is the transmitted frequency, c is the speed of light, and t is the angle that the transmitted signal makes with the ground. Of course, this is only approximate since, for example, the radar beam spreads out causing a spead of returned frequencies (varying angles of intersection).
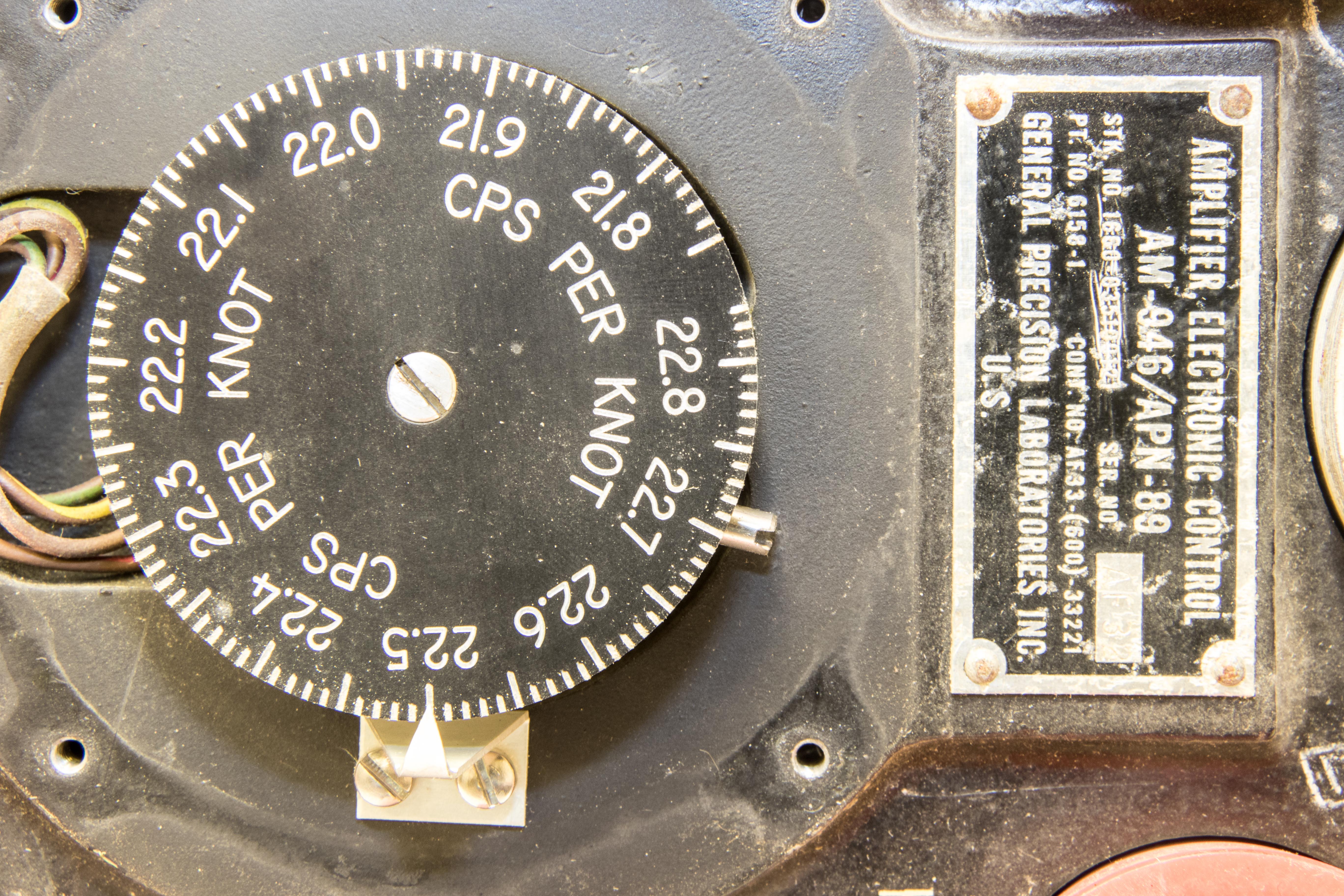
The APN-89 radar used a frequency of 8700-8900 MHz. The quoted accuracy was 2.1 knots and 0.15% drift angle.